English
English 中文简体
中文简体 русский
русский Español
Español عربى
عربى Los principios mecánicos de los manipuladores inteligentes incluyen principalmente los siguientes aspectos:
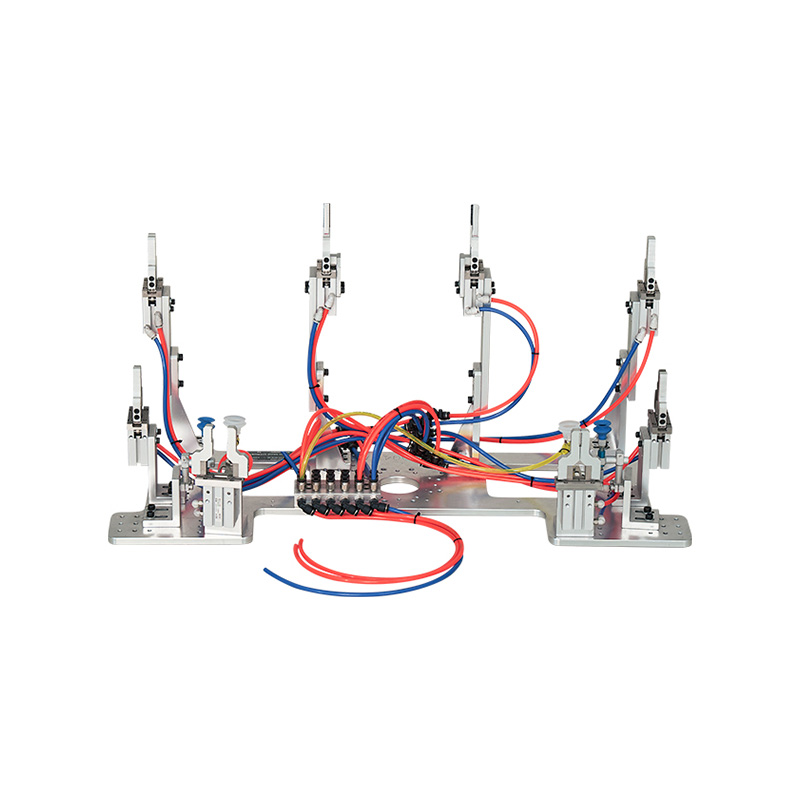
1. Estructura: Los manipuladores inteligentes suelen constar de múltiples articulaciones y bielas para formar una estructura mecánica móvil. Las articulaciones son accionadas por motores y dispositivos de transmisión, que pueden realizar el movimiento de cada articulación, logrando así un funcionamiento flexible del manipulador.
2. Transmisión mecánica: Las articulaciones de los manipuladores inteligentes suelen ser accionadas a través de dispositivos de transmisión (como engranajes, correas de transmisión, etc.). La transmisión convierte la rotación del motor en movimiento de las articulaciones, lo que permite al manipulador realizar operaciones y agarres precisos.
3. Mecánica teórica: El movimiento del manipulador inteligente se puede describir y analizar mediante cinemática y dinámica en mecánica teórica. La cinemática estudia la relación entre las características geométricas, la posición y la velocidad del manipulador, mientras que la dinámica estudia los patrones de movimiento del manipulador bajo la acción de fuerzas y momentos.
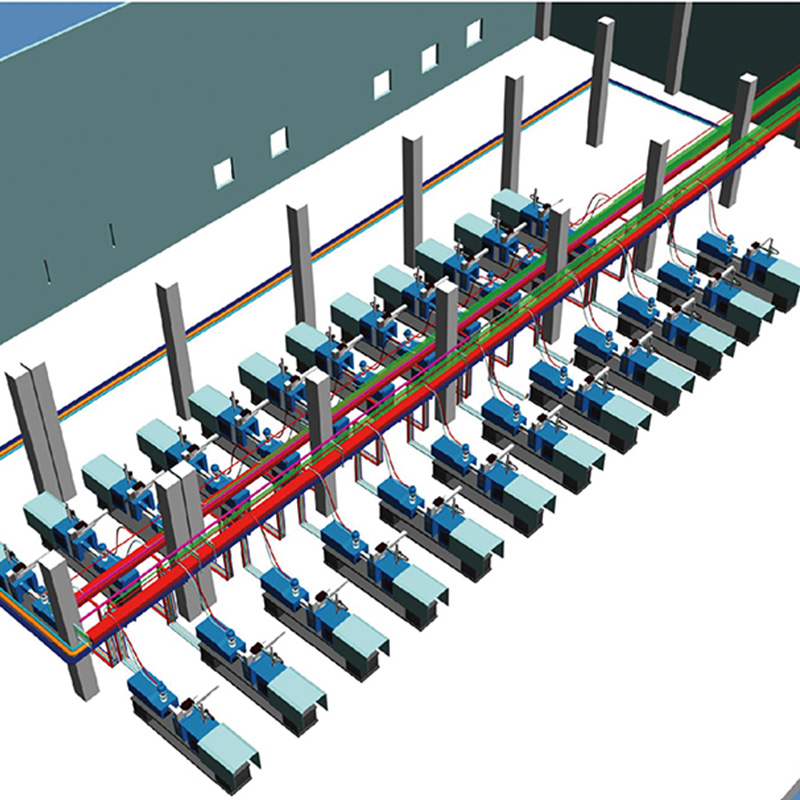
4. Sistema de control: Los manipuladores inteligentes suelen estar equipados con un sistema de control que controla el motor para lograr un movimiento preciso del manipulador. El sistema de control puede combinar sensores y tecnología de programación para realizar el funcionamiento automatizado de manipuladores inteligentes según los requisitos de la tarea.
En general, el principio mecánico de un manipulador inteligente se basa en la aplicación integral de la estructura mecánica, el dispositivo de transmisión y el sistema de control para lograr un movimiento flexible y un funcionamiento preciso del manipulador.